The Row-Bot
by Dan Odell and Dan Stevens
| The first step in the design process was developing a mechanism that would provide our desired rowing motion. These avi files show early ADAMS simulations as we attempted this. The first shows an underconstrained four-bar linkage. The second, a linkage that is properly constrained by adding a gimble, and very close to the linkage we would ultimately use. | |||
 |
 |
||
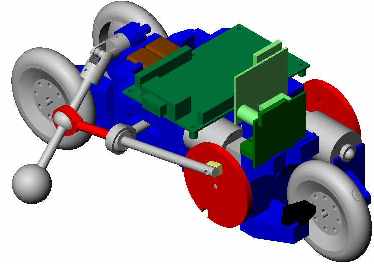
| The next step was to track down all of the necessary components and generate a solid model of the system using SolidWorks. Our design called for two universal joints to anchor the arms, and four gimbels to move them. We were given two motors for propulsion, but without any data sheets. Additionally, we would require batteries, two H-bridges, a DSP board, and sensors to complete the system. An isometric view of the solid model is shown in the header, and a video showing the model in action is given through the link below. After the solid model was completed, the device was constructed using traditional machining and Fused Deposition Modeling. In addition, the final solid model was imported into ADAMS to ensure proper function. The video of this simulation is also available below. Notice the nice airfoil path that the paddle foot follows. | |||
 |
 |
||
|
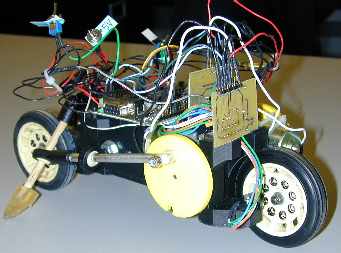
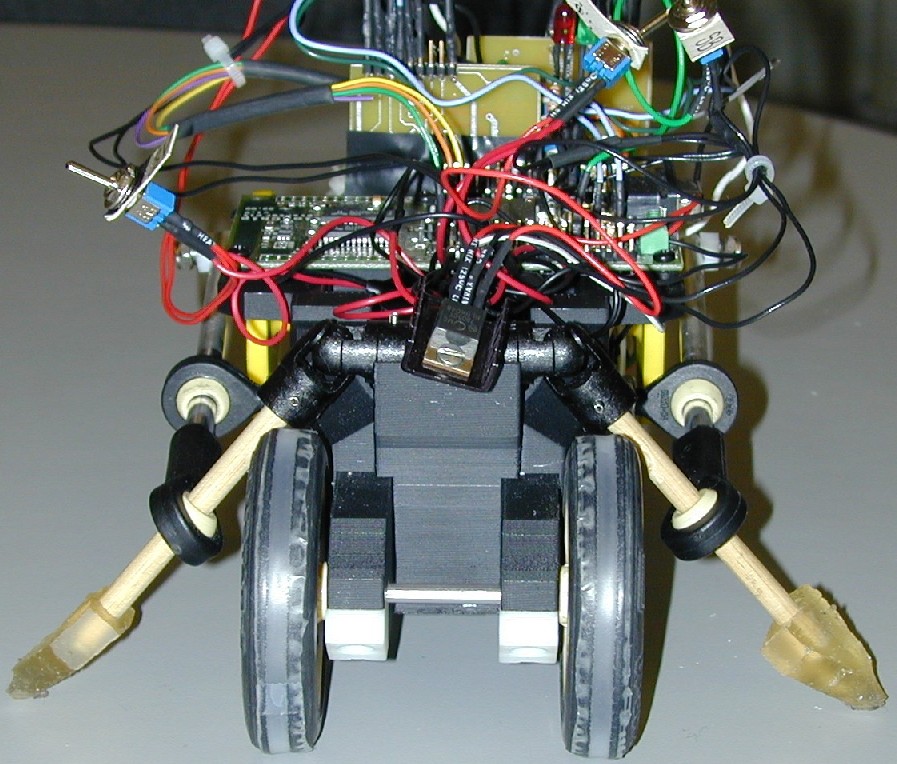
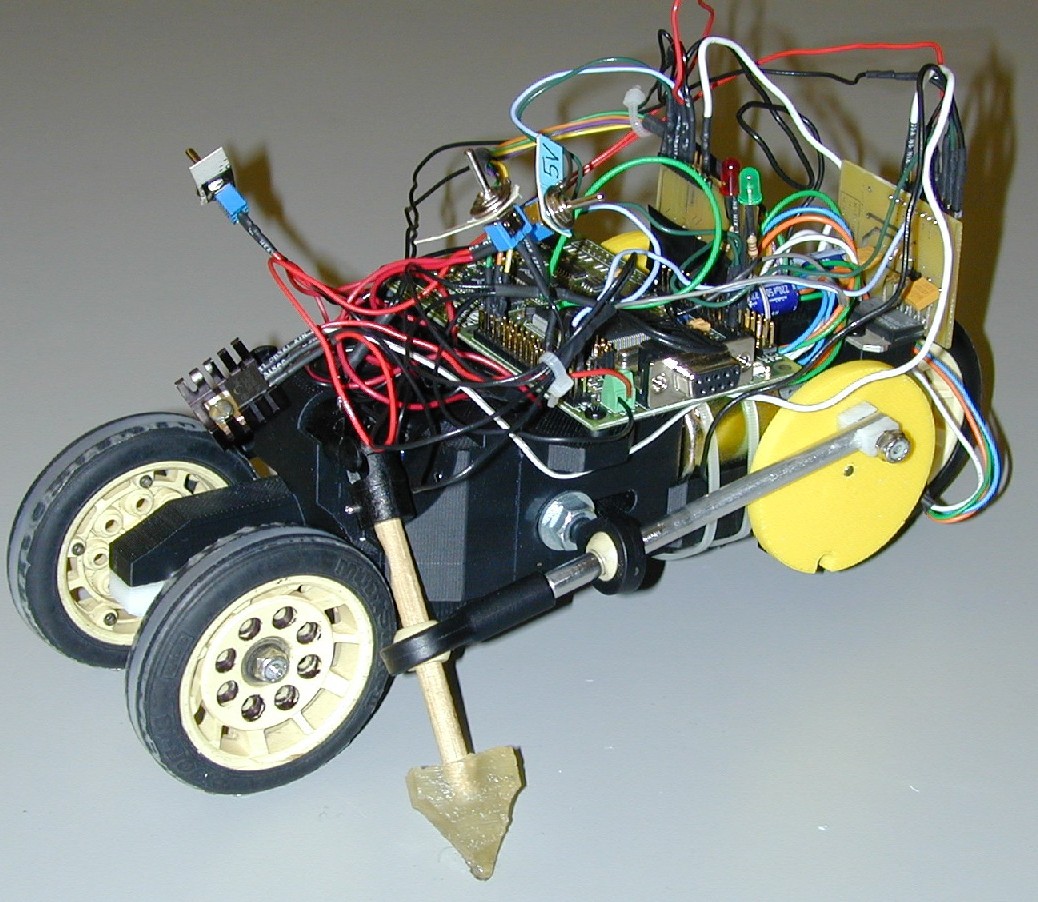
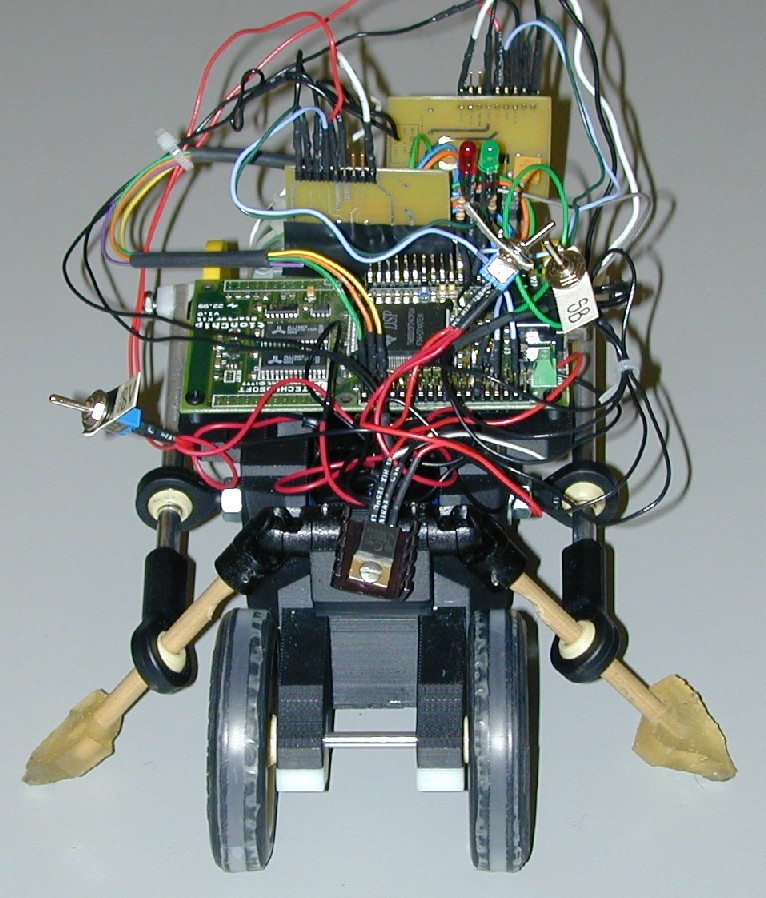
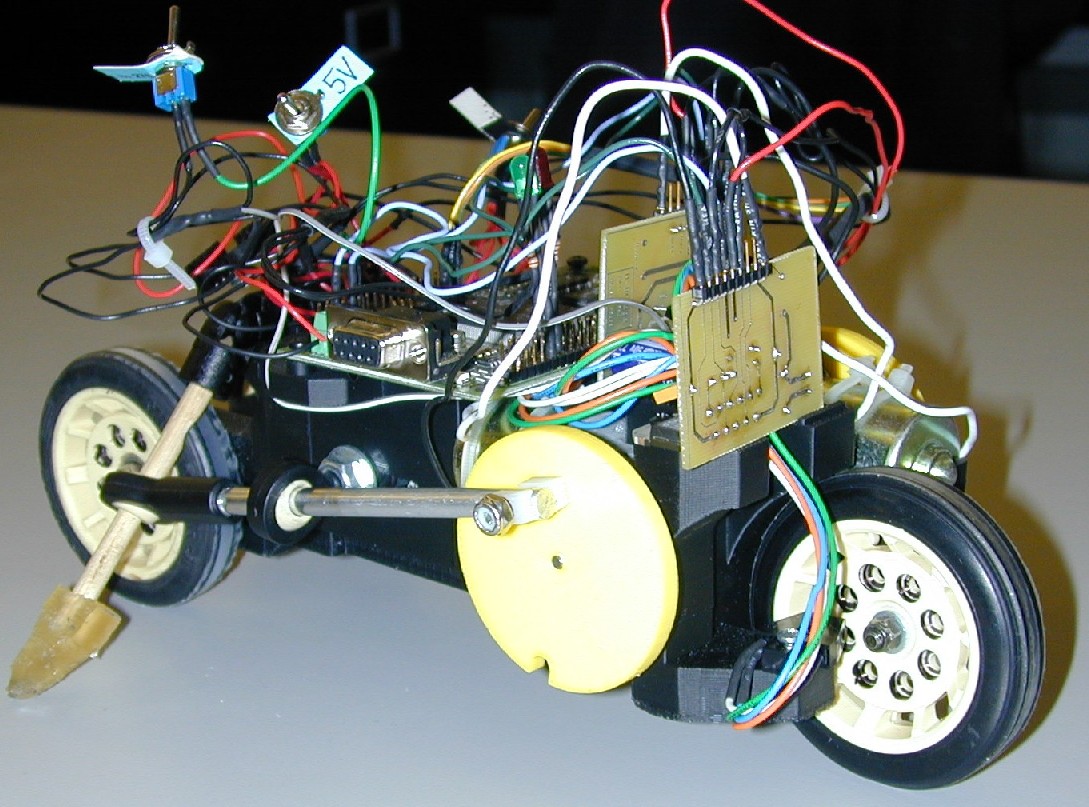
After completing the build, and the software, the row-bot was ready to go. A couple of last minute changes were required to improve the functionality. First, the paddle feet were changed from "super bouncy balls" to custom cut polyurethane to give them a little more compliance. This allowed them to get a good grip on the ground without binding up. Second, the wheels were taped to make them more slippery, and facilitate turning. Finally, a clean, smooth surface (such as a tabletop) was required for good operation. The floor was found to be too dusty (and therefore the paddles couldn't get a good grip), and the carpet was too difficult to turn on. Shown below are pictures of the completed Row-Bot, along with a short video of it in action. The video demonstrates foward propulsion as well as turning. The result - it goes straight and turns - therefore meeting our initial goals. | |||
 |
 |
 |
 |
 |
|||